
By Martin Ribelotta | August 16, 2020
Perfect, you’ve created your embedded system, provided it with an external storage system, created a serial terminal to test things out, and then started your journey through routine… testing as if you were sitting on an old 70’s ticker while you listen to “Sheer Heart Attack” by Queen (a plus for the sound without a synth)
ELF Load: Dynamic load and execute for your mcu.
But wait! This is not totally the old-fashionist experience… My binaries must be embedded in the firmware in order to work! You also shouldn’t expect to be able to listen to your old 5’’ 1/4 drive (or better, your dataset) but the fresh experience of binary loaded is lost for ever and never… or not?
Loading binaries, the simplest way
In an old PC, when you type a command, the operating system searchs a file with the command name and extension COM (or EXE in newer versions) and tries to load it… At this moment, several things happen:
- The system calculates memory usage of the executable and reserves this amount of memory in the system
- The OS reads the file and copies the pertinent areas in the reserved memory.
- Depending on architecture, some adjustments to loaded data may
be needed. In the case of 8086 and
*.comfiles, the architecture of the memory management unit enables load without any adjustments in this phase. - An execution environment is created (reserving memory if required) and configures some registers of the processor to point to this environment before the next phase
- Finally, the OS jumps to the entry point of binary and delegates the execution to the recently loaded code
As mentioned in the point 3, normally in a PC processor the architecture enables execution with minimun or unexisting binary modifications (segmentation in 8086 and MMU in modern x86 systems).
You can see next, the 8086 memory layout at COM executable load:
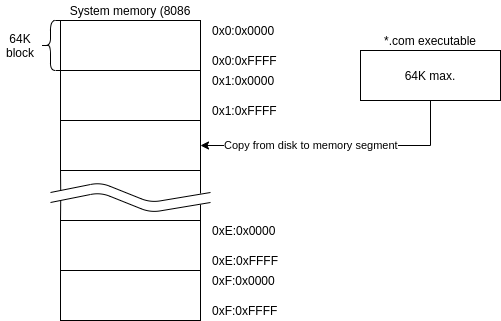
In this example, the binary is limited to 64K of memory and the processor reserves one of the segments for the program usage (in the execution, the program can load more code or request more memory to OS, but the binary is limited to one 64K segment). In modern systems with a memory management unit (MMU), you can map any virtual direction to any real direction (well, not exactly… in 4K blocks of granularity, but you do understand, right?) and can select the memory layout of your executable freely.
Usually, the process to load executable in MMU systems is more complex, involves copy of a portion of the file dynamically at request using a virtual memory trick called page-fault. In short, you only need to configure the memory of your process with required pages and mark as no-present this pages; at the moment is necessary to access these pages, the hardware triggers an interrupt thath is caught by the OS who proceeds to load these pages for you.. cool don’t you think?.
But when you try to replicate this behavior in your embedded system… the magic is gone and you will quickly see the problem: You need to use fixed address for your binary load:
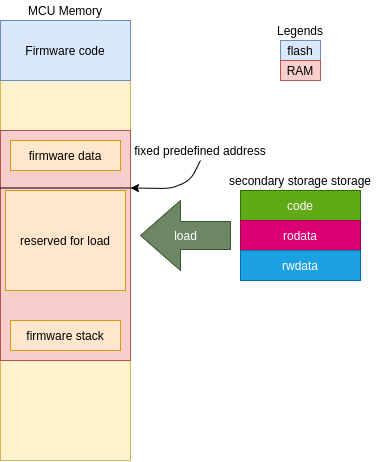
This schema works more or less properly for a single executable, but if you need nested executable load or multithread load, this approach is quickly wasted.
In many architectures (highlighting ARM, MIPS and RISC-V) the jumps normally refer to the current program counter (PC) to jump. In this architectures, the code is easy loadable in any position of memory (respecting some rules of aligns) but the data is more complex because it needs one or two indirections to refer a proper memory area independently of the load position.
Fixing the world one word at time
If your processor lacks MMU, to load programs at arbitrary addresses, you can look for several approaches:
-
Make the code suitable to detect the current address and adjust their references in accordance to it: This is called “position independent code” or PIC (similar approach with very subtle differences is called “position independent executable” or PIE) and implies one or two levels of indirection in any code. But don’t celebrate yet, the PIC code has various challenges to solve:
- Jump of code independent of position: This normally is made using special processor features like PC relative jumps. This is easy when the compiler knows the relative position of code in compile time, but becomes difficult when the address of the code is dinamically calculated, like in jump tables.
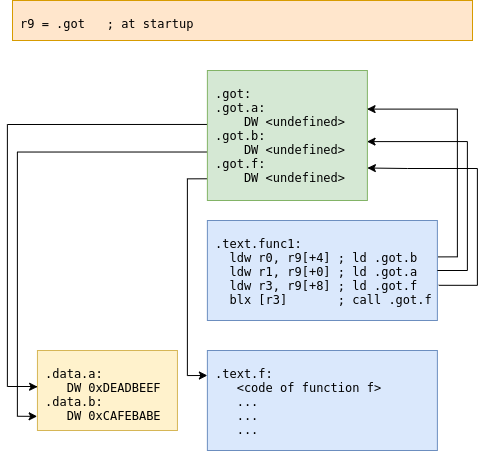
- Access data in arbitrary loadable position: Normally, the PIC code uses indirect access through a relocation table called global offset table (GOT) modified by the loader before code startup.
- Mix of previous points: Normally, when your code jumps to a calculated position, you need a GOT entry reserved for this calculus and need to adjust this entry like other data access. Due to optimization, the compiler may prefer other approach, using an stub of code adjustable at startup for perform this dynamic jump. This technique is called procedure linkage table and consists in a little stub of code that performs a call to undefined pointer (normally an error function) and the loader adjusts this code in load time to point to the correct code block. This approach enables you to share code in libraries, although it requires a little more of work.
-
Leave any memory reference as undefined and mark in a table the needed to modify this portion of code in order for the program to work.
The first approach needs less work in the loader area but the performance at runtime is worse than the fixed memory address code. In contrast, the second approach needs more loader work but the performance of the code is nearly the same as the fixed address code…
In the end, the PIC code is the only suitable way to share code across multiple libraries for single binaries. For example, with the PIC code you can have a one library for string formatting (aka printf) and share the code with many programs. Additionally, the PIC code can reside in flash without any modifications, only a PLT and GOT is required in RAM, and change from program to program (this require OS help on context switch).
Global offset table schema
Relocation schema
// extern int f1(int, int, char);
// void func1() {
// f1(0, 0xAA55AA55, 32);
movs r2, #32
movs r0, #0
ldr r1, [pc, #4] // <func1+0xc>
ldr r3, [pc, #8] // <func1+0x10>
bx r3
nop // Align instruction
.word 0xaa55aa55
.word 0x00000000 // <f1> replace with addr of symbol
Put ya guns on!
Our preferred approach in embedded systems is to load the code and relocate individual references instead of GOT usage due to the performance degradation of adding two indirections (one for GOT pointer and one for GOT entry) in every memory access.
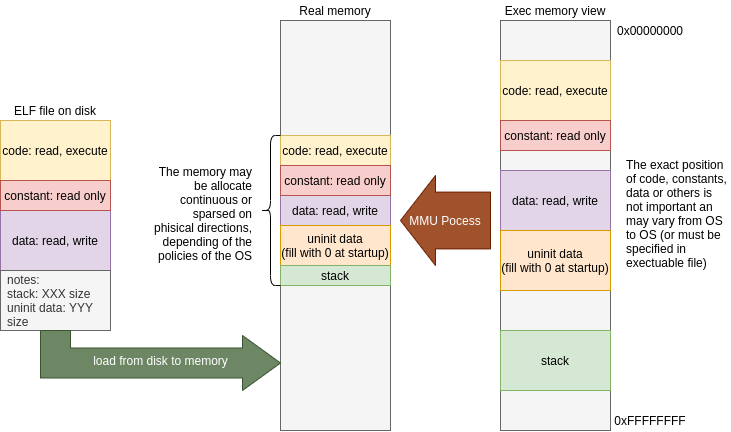
In MMU systems, the ELF load process is really straightforward:
- Map the file from disk to memory (with help from MMU and OS swap service) and resolve memory map to satisfy the ELF layout.
- Scan a relocation table and resolve undefined symbols (normally from dynamic libraries in the system).
- Make a process environment and adjust the process register to point to it (normally an in-memory structure representing the process state).
- Let the OS load the new processor state with the correct environment. Normally, this is limited to putting the process state in a ready queue in the OS structures and letting the scheduler do the switch process when available.
Without MMU, the process require some precautions:
- You cannot load the entire ELF from secondary storage because this action consumes more memory than expected (the ELF may contains debugging sections, some unneeded information like symbol tables and other non required data at runtime).
- The memory is non-virtualized, all process share the same memory space and can potentially access (in a harmful way) the memory from other process… You need to take precautions, some MCU have a protection memory system (like MPU on ARM or PMP on RISC-V) to mitigate this issue.
- You need to reserve only loadable sections like
.text,.data,.rodata,.bss, and.stack, other sections are only used at the load time like relocation symbols and elf header. - You need to travel trough all symbols and relocate every entry in the binary… this may take some time but the execution time has little impact compared with the PIC code.
You can see our implementation of the load-relocate schema in this link.
Due to the simple nature of the loader, it cannot handle all type of relocations and sections. Ideally, you can extend the code to cover your necessities, but the actual implementation works fine with some precautions at the moment of guest binary compilation:
- You cannot use “COMMON” sections, all of non initialized data must
be in BSS. The gcc flag to force this is
-fno-common. - You need to link the final ELF as a relocatable executable.
This prevents the linker from resolving undefined symbols,
instead it embeds the information needed to resolve the symbols in the
binary. The gcc or ld flag to force this linking behavior is
-r. - You need to force the compiler to produce only “word
relocation” types. This is the simplest relocation form and
is easier to handle in load time. In ARM architecture, this
forces all relocations to be of type
R_ARM_ABS32. To enable this, gcc for ARM provides the flag:-mlong-call. In old compilers this is not strictly true and the flag will not produce correct results, many relocations will be of typeR_ARM_THB_CALLorR_ARM_THB_JMP. Don’t panic, the actual loader can handle this type of relocations, but the load phase will be sensibly slower due to major processing work. - By default, all compilers provide a startup library that is
executed before main, and initializes some data and code for you,
but this is undesirable in this situation. You need to disable
the inclusion of these codes and provide a self written version
to
_startor other function of your election. This behavior can be enabled in gcc using the-nostartfilesflag.
Additionally, you can provide a linker script with your preferred memory layout, but the suggested minimum linker script layout looks like this:
ENTRY(_start)
SECTIONS
{
.text 0x00000000 :
{
*(.text* .text.*)
}
.rodata :
{
*(.rodata* .rodata.*)
}
.data :
{
*(.data* .data.*)
}
.bss :
{
*(.bss .bss.* .sbss .sbss.* COMMON)
}
This places all sections in contiguous memory. If your architecture
requires some align, you need to add “. = ALIGN(n);” statements
between sections.
At this point, the loader API is really simple:
Initialize it.
You need to define an environment variable for the new binary with:
typedef struct {
const ELFSymbol_t *exported;
size_t exported_size;
} ELFEnv_t;
...
const ELFEnv_t elfEnv = {
symbolTable,
sizeof(symbolTable) / sizeof(ELFSymbol_t)
};
This contain a reference to an array of resolvable symbols and the number of the elements inside the array. The entries of this array contain the name and the pointer to be resolved:
typedef struct {
const char *name; /*!< Name of symbol */
void *ptr; /*!< Pointer of symbol in memory */
} ELFSymbol_t;
...
const ELFSymbol_t symbolTable[] = {
{ "printf", (void*) printf },
{ "scanf", (void*) scanf },
{ "strstr", (void*) strstr },
{ "fctrl", (void*) fctrl },
};
Additionally, you need to create an object of type
loader_env_t and set the symbol table inside this struct.
ELFExec_t *exec;
loader_env_t loader_env;
loader_env.env = env;
In the next phase, you need to call load_elf with the PATH of
the binary, the environment and a reference to the pointer of
ELFExec_t:
load_elf("/flash/bin/test1.elf", loader_env, &exec);
If the operation ends successfully, the return status is 0. In
case of an error, it will return negative number indicating the specific error.
In this point, you have the binary loaded and allocated in the memory, and you can jump into start entry point or request the address of specific symbols:
In the first case, you need to call the function like this:
int ret = jumpTo(exec);
if (ret...
If the program ends successfully, the function returns 0, otherwise it will return a negative number depending to the error.
If you need to request an specific function pointer you can use
void *symbolPtr = get_func("myFunction", exec);
This returns a pointer to the function start or NULL if the object
is not found.
If you need an arbitrary pointer to other symbol (variable, constant or whatever) you can use:
void *symbolPtr = get_obj("myVar", exec);
After all, you can free all allocated memory for the binary and the metadata of the ELF file with:
unload_elf(exec);
System interface
In order to be flexible in the implementation, the library leaves undefined some API of low level access for port to any system.
The low level layer need the following macros defined:
LOADER_USER_DATA: Structure or datatype to contain the platform dependent data for file access. For example, this needs at least, a file object (integer file descriptor, FILE* struct, or whatever) and an environment pointer toELFEnv_t.LOADER_OPEN_FOR_RD(userdata, path): open file in path and modify userdata in order to save the file descriptor, or file pointer.LOADER_FD_VALID(userdata): Check if the opened file data is a valid file and can be read from.LOADER_READ(userdata, buffer, size): Readsizebytes from file descriptor inuserdataand put it inbufferarray.LOADER_WRITE(userdata, buffer, size): Writesizebytes to file descriptor inuserdatafrombufferpointer. This macro is not used internally, it is only defined in symmetry with the macro above.LOADER_CLOSE(userdata): Close the file descriptor inuserdata.LOADER_SEEK_FROM_START(userdata, off): Move read pointeroffbytes from the start of file pointed by descriptor inuserdata.LOADER_TELL(userdata): Return current position of file descriptor inuserdata.LOADER_ALIGN_ALLOC(size, align, perm): Returnsizebytes aligned asalignbytes withpermpermission access. If you do not provides differentiate access of memory region, the returned region can be write, read and execute. By default, the macro call a functionvoid *do_alloc(size_t size, size_t align, ELFSecPerm_t perm);.LOADER_FREE(ptr): Deallocate memory from pointerptrLOADER_STREQ(s1, s2): Compare two strings s1, and s2. The result of equal strings must be!= 0and when the strings differ, the result of this macro must be0. The simplest implementation is:(strcmp((s1), (s2)) == 0)LOADER_JUMP_TO(entry): Perform a jump to application entry point.entryis the address of the first instruction of the code. You can simply cast the value to a function pointer with selected fingerprint or do a more complex operation like environment creation, start a new RTOS thread or whatever is required for your architecture.DBG(...): Print (in printf like format) debug messages. Can be empty if you do not need debug messages.ERR(...): Print (in printf like format) error messages. Can be empty if you do not need error messages.MSG(msg): Print (in printf like format) information messages. Can be empty if you do not need information messages.#define LOADER_GETUNDEFSYMADDR(userdata, name): Resolve symbol namenameand return its address. The most simple way to do this is to perform a search in specific structure underuserdatawith a symbol table. If the process fail, the data returned must be0xffffffffAKA((uint32_t) -1)
The golden implementation uses ARM semihosting IO for file access, but you can port this to any API like fatfs or similar.
References
elf-loader for esp32 implementation
Executable an linkable file load on linux
More ELF information with relocation format
ELF Relocation types from ARM The main goal is section 4.6 explaining all relocation formats